
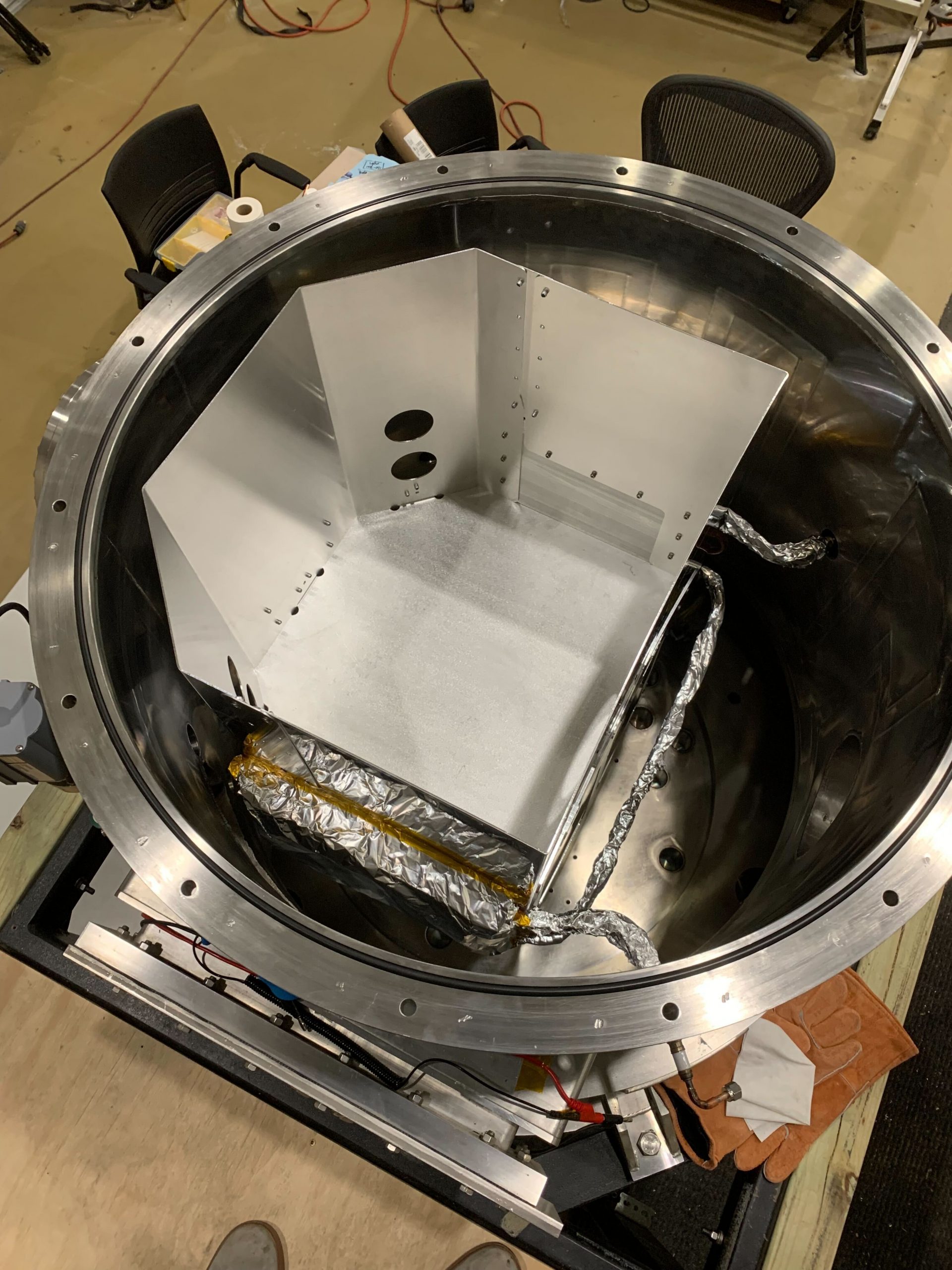
CryoShroud TVAC Addition: Achieving Space Temperatures on Earth
There is a great need within all space programs to evaluate electrical and mechanical hardware during operation under various thermal conditions. Analysis is a critical tool during the early design of hardware but verification via physical testing is crucial. Electronic boards and motors become non-operational at low temperatures so the demonstration of adequate heating systems … Continued