A rover mission has two landings. The first is when the lander reaches the surface, and the second is when the rover’s wheels touch the ground and roll away. These are preceded by the violent shaking of the launch that requires attachment to the lander to be stiff, strong and certain. Once on the Moon, the rover’s release must be just as certain. The process of attaching and releasing is called stowage and deployment.
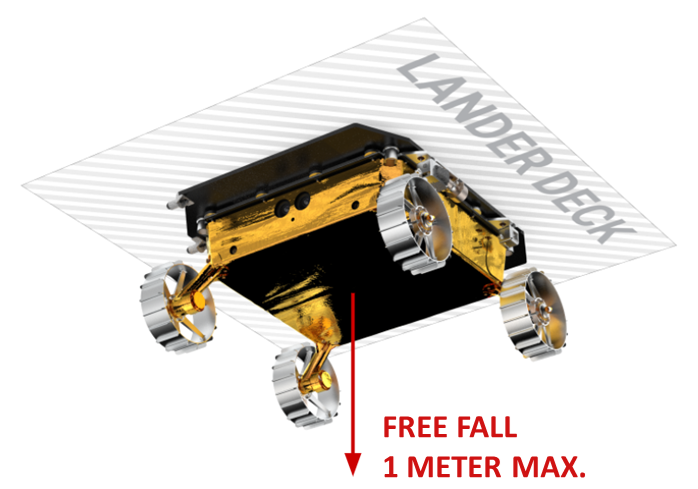
Rovers prior to MoonRanger like Lunokhod, Sojourner and Yutu have been belly-bolted to their landers and used ramps to deploy to the ground. Alternately, MoonRanger is top-bolted to the belly of its lander, then drop-deploys after lander touchdown, free falling to the lunar surface.
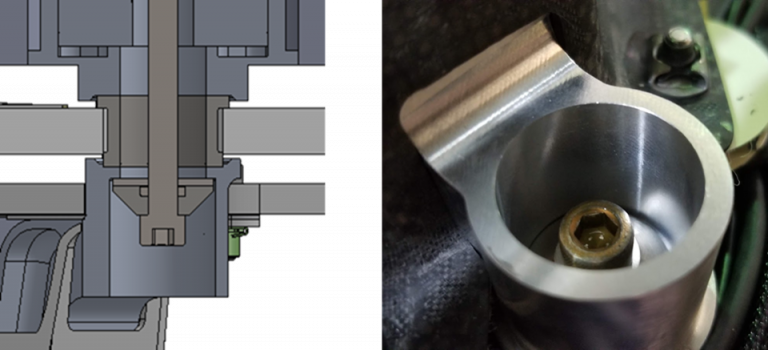
The rover is held to its lander by releasable connectors, known in aerospace industry as Hold Down Release Mechanisms (HDRM’s) – one in each corner of the chassis, and a fifth in the center. These HDRM’s act as rigid nuts during stowage, but release completely on command (by the lander) to deploy the robot. A tightly coiled fuse wire within each HDRM holds together a retention mechanism that captures its bolt. An electrical signal causes the fuse wire to heat up and break, releasing the mechanism and dropping the bolt.
Five rigid aluminum brackets are clamped by the HDRM bolts to secure MoonRanger’s chassis to the lander. Steel inserts are situated between these aluminum brackets and the lander deck to pinch and secure the solar panel against launch vibration. Hence the bolt-up serves double duty of securing and rigidizing both the chassis and the solar panel.
The corner bolts release first so that the rover is suspended by its single central HDRM. The drop occurs when the last central HDRM is fired, releasing the rover to freefall to the ground.
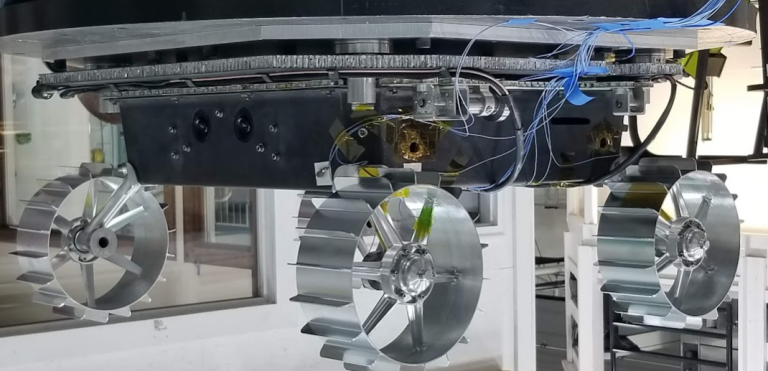
A model of the robot is tested on a shake table at launch-level vibrations to ensure the holding capability of the bolts, rigidization of the stowage, that the HDRMs will not misfire, and that the solar panel is undamaged during launch.