small rover.
big mission.

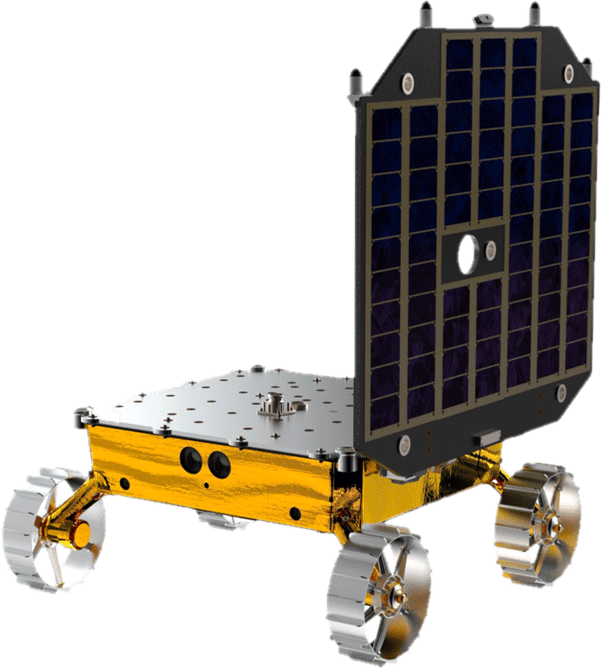
MoonRanger is the size of a suitcase and weighs about seven pounds when it is on the Moon. While exploring, it autonomously senses terrain, navigates, estimates its location, and builds maps. It also measures the concentration of hydrogen proportional to the water that underlies its route. It does not carry a radio to directly communicate with Earth, so exploration must be completely autonomous for any traverses out of WiFi range of its lander.
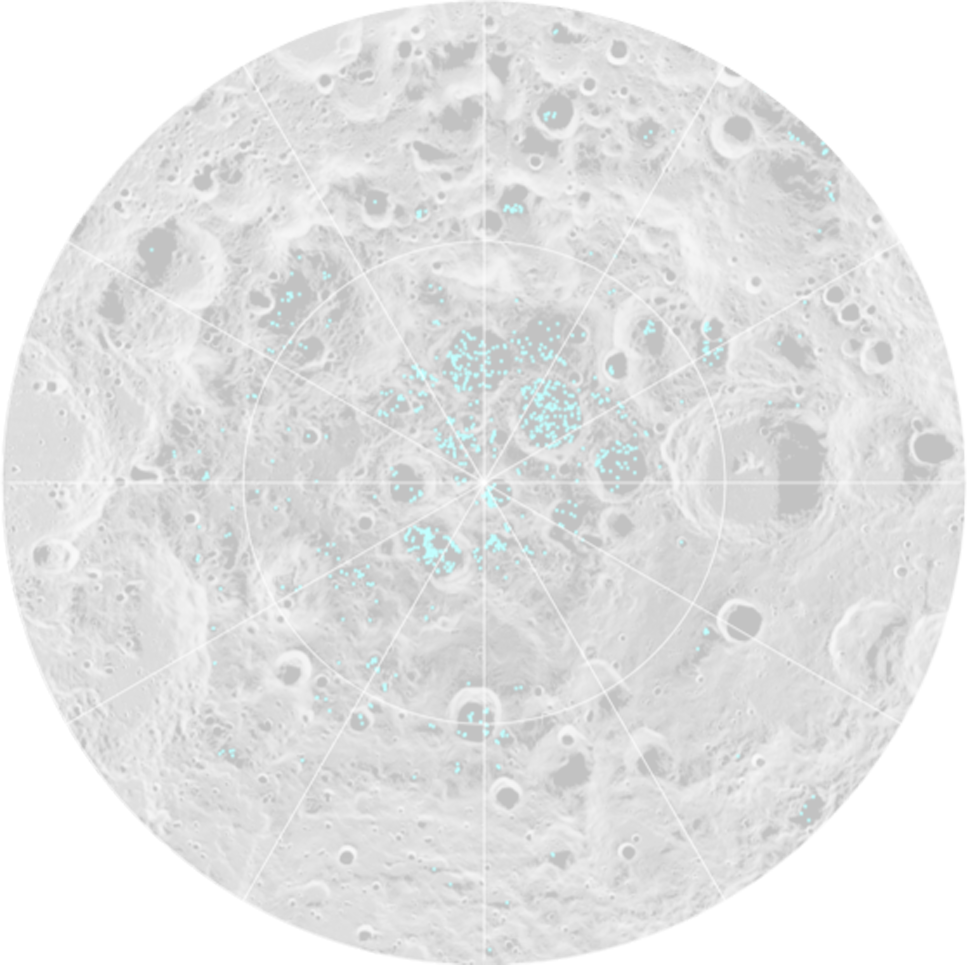
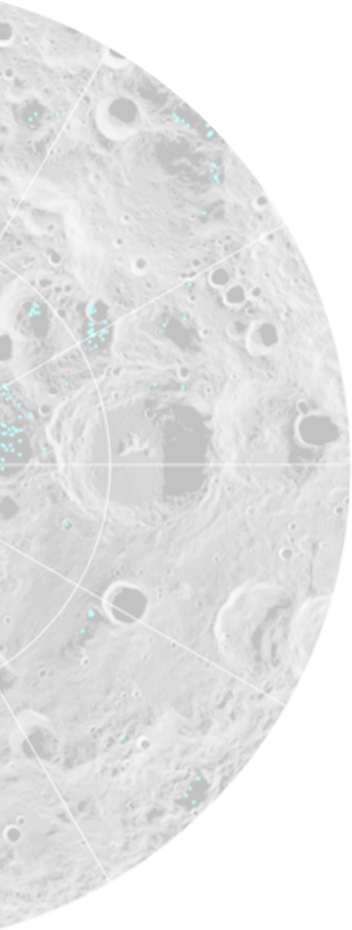
MoonRanger will search for ice. If ice is sufficiently concentrated, and if its water can be processed, water becomes the key resource for living and working on the Moon. Humans can drink the water, grow food with it, and breathe the oxygen derived from it. Hydrogen and oxygen from the water can power fuel cells to produce electricity. The hydrogen and oxygen are also rocket propellants for exploring beyond the Moon and shuttling back to Earth.
MoonRanger is the size of a suitcase and weighs about seven pounds when it is on the Moon. While exploring, it autonomously senses terrain, navigates, estimates its location, and builds maps. It also measures the concentration of hydrogen proportional to the water that underlies its route. It does not carry a radio to directly communicate with Earth, so exploration must be completely autonomous for any traverses out of WiFi range of its lander.
MoonRanger will search for ice. If ice is sufficiently concentrated, and if its water can be processed, water becomes the key resource for living and working on the Moon. Humans can drink the water, grow food with it, and breathe the oxygen derived from it. Hydrogen and oxygen from the water can power fuel cells to produce electricity. The hydrogen and oxygen are also rocket propellants for exploring beyond the Moon and shuttling back to Earth.
MoonRanger is pioneering a class of high-performance microrovers that will contribute immensely to planetary exploration and enterprise. It will push the boundaries of miniaturization, autonomy, and operation in darkness at a lunar pole.
The challenges of miniaturization and automation for the pole are profound.
MoonRanger pushes boundaries of miniaturization, autonomy, high-performance computing, perception in brilliance and darkness, and energetics. The essential mobility, electronics, and sensing are profoundly challenging at such small scale. Robot thermal regulation is difficult because the Moon presents extremes of cold and hot, and a small rover has so little thermal mass to moderate the rate of its heating and cooling. To succeed in its short mission, MoonRanger has to stay on the move to achieve a high average speed unprecedented for a small rover. Beyond technical virtuosity, MoonRanger pushed boundaries of swift development, economy, and innovation — and did so from a university.