
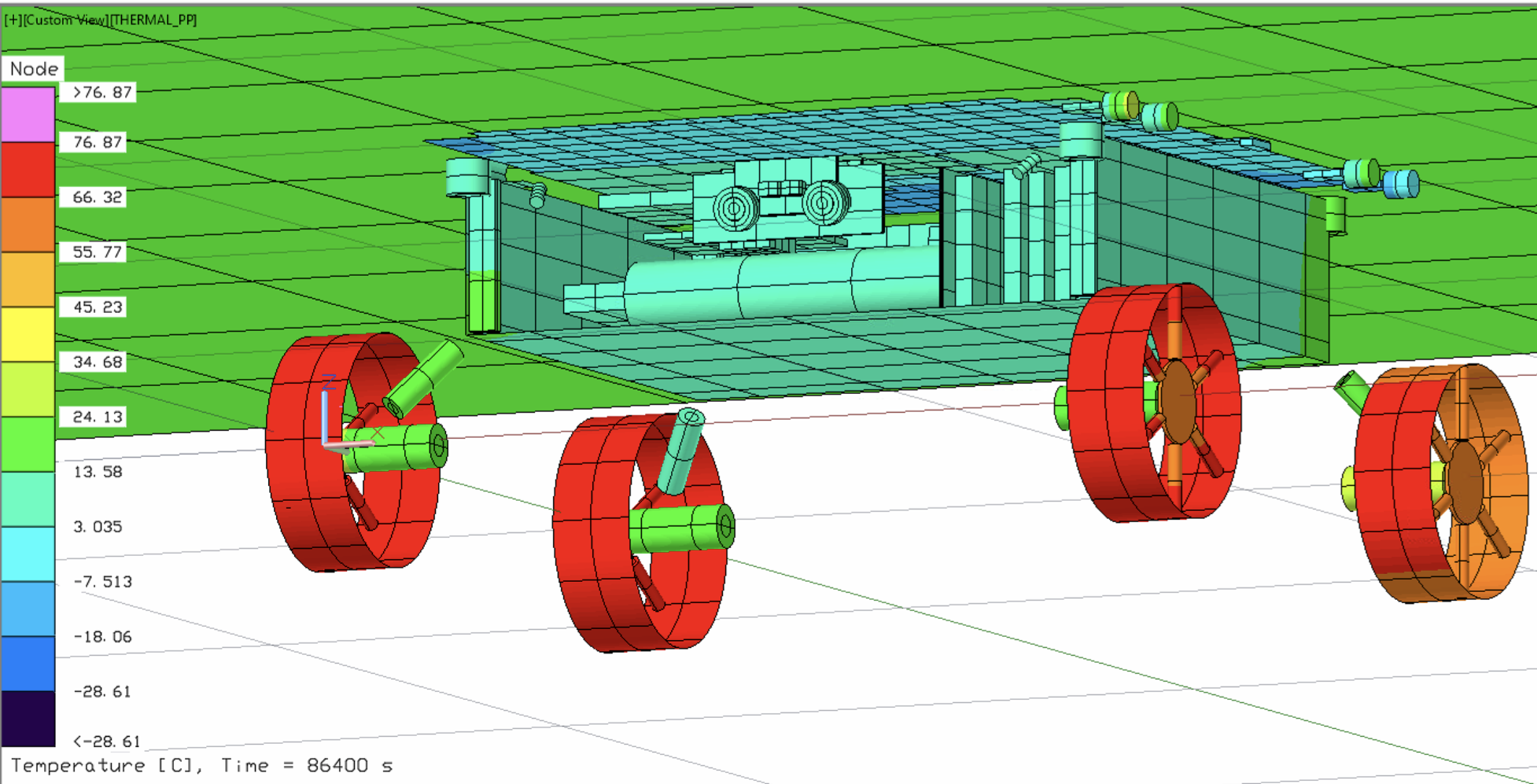
Thermal Vacuum Testing
Thermal vacuum testing of components and assemblies is essential during the design, prototyping, and pre-integration of a Moon rover to ensure that its electronics and materials will operate at the pole of the Moon, where temperatures can swing 250 degrees from hot to cold, but electronic temperatures must be moderate. This requires a chamber that … Continued