The rover must actively regulate its interior temperature while polar surface temperatures vary by 250 degrees and solar-electric power generation varies from zero to 70 watts. Although the rover has impressive passive thermal regulation, it could not possibly maintain its electronics at the even, moderate operating temperatures without (1) determining the temperatures of its electronic components, (2) altering its bearing to increase or decrease sun-warming and solar power generation, and (3) switching components on/off or putting computers into altered power modes to reduce heat generation, and (4) actively heating with resistive heaters, and thermal management software to actively regulate temperatures. These four capabilities constitute MoonRanger’s Active Thermal Management.
(1) 13 thermistors are placed at strategic locations to measure temperatures on or near computers, batteries, electronic boards, cameras and motors.
Figure 1: Thermistors
(2) The 1350 watts/m^2 of sunpower on the Moon adds heat to the rover in addition to the solar-electric power it generates. The areas of exposed surfaces and their incidences to the sun are quite dependent on the rover’s bearing relative to the sun. While driving these bearings are governed a great deal by navigation planning. Beyond navigation considerations, the rover’s bearings are altered by thermal considerations that regulate its temperature. The rover can steer, slows, or even stop in a favored orientation to heat or cool itself. In MoonRanger this capability is coded as an autonomous behavior since the rover must operate for long periods of time without communication to Earth, and in some cases operate autonomously beyond communication range with its lander.
(3) When thermistors indicate that an individual component within MoonRanger is too cold or hot, the thermal management algorithm assesses that and takes action at the device level. For instance, the rover’s TX2i computer can be commanded to operate at several wattage power consumption levels that correspond to several levels of performance. If that computer is too hot for operations, then the algorithm will reduce its power consumption (heat generation) by throttling its performance. The autonomy algorithm makes decisions to thermally protect the rover and complete the mission.
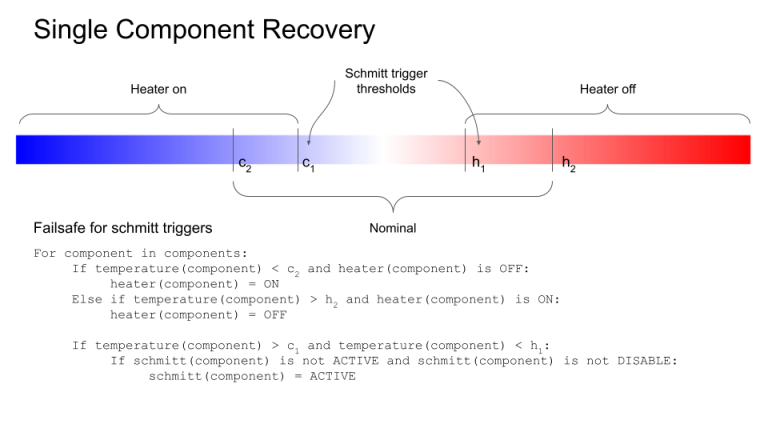
The TX2i enforces thermal survival and can override the rover’s systems if needed. In single component recovery, the thermal autonomy algorithm can override MoonRanger’s schmitt triggers heaters. The heaters are ordinarily regulated passively by schmitt triggers, meaning that there is typically no computing behind these regulating heater mechanisms. There are thresholds that turn the heaters on and off for nominal regulation. However, the thermal regulation algorithm can override the system and correct it if necessary.
Figure 2: Pseudo-code; c1 and h1 are the initial temperature thresholds for the heater to be on or off; if it reaches past that point, the algorithm kicks in.
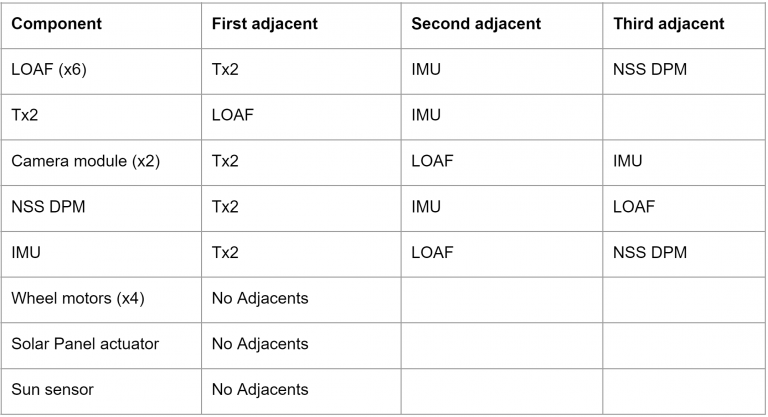
In Multiple Component recovery, multiple adjacent heaters will be turned on or off when single component recovery is not sufficient enough to bring it within safe temperatures. For instance, if the IMU (Inertial measurement unit) is too cold and overriding the schmitt triggers does not warm it enough, then adjacent heaters of other components, the Tx2, LOAF and NSS DPM can be turned on.
Figure 3: Table of adjacent components’ heaters that will be turned on if the object in the “component” column is too cold.
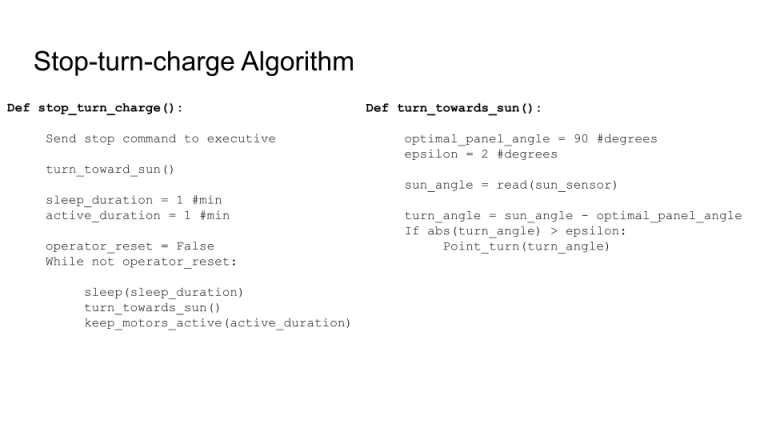
The algorithm also has a contingency plan for MoonRanger’s worst case scenario- if single component and multiple component recovery are not sufficient in bringing the rover to an appropriate temperature. In this case, the algorithm will direct MoonRanger to stop, turn toward the sun with its solar array, charge and heat. This is called whole robot recovery.
Figure 4: Pseudo code that defines and directs MoonRanger to turn toward the sun and charge.
MoonRanger’s most thermally sensitive electrical components are its batteries. These must remain above 0 C to accept charge and below 35C to preclude overheating. The highest priority and last resort of the thermal management system – by all the measures presented here – is to protect these batteries by maintaining their temperatures in the viable range for rover survival.
Interviewed: Paulo Fisch and Srinivasan Vijayarangan