Vine Pruning
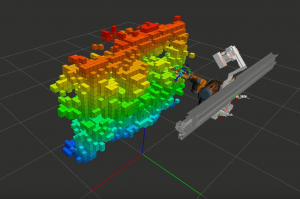
Training of a reinforcement learning agent for viewpoint optimization and reaching pruning points in dormant vine trees.


Training of a reinforcement learning agent for viewpoint optimization and reaching pruning points in dormant vine trees.
