
Home » Buggspray


{kind=link}
The Buggspray robotic system is designed to function as an herbicide sprayer in weed management for specialty crops.
In pursuit of this goal, the robot has been designed with several unique characteristics.
In no particular order, these are
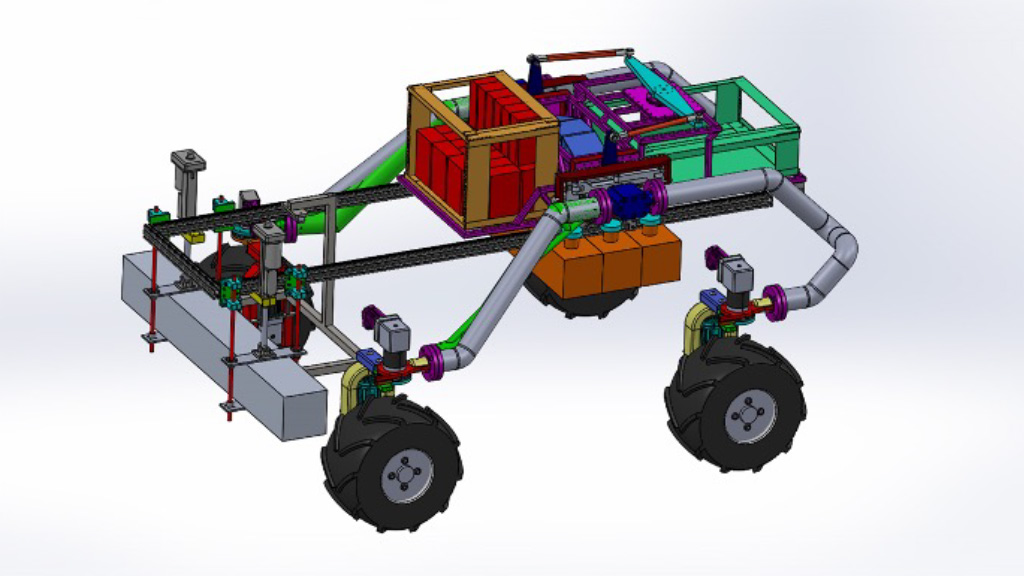
- four wheel steering
- a differential-bar rocker mechanism
- and an adjustable wheelbase width
Four wheel steering means each wheel is independently steerable, and allows for switching between different steering modes, such as Ackermann, Dual Ackermann, Crab, or even Skid Steer. The differential-bar rocker mechanism allows the robot to travel over nonflat terrain and keep the chassis/sprayer system at a relatively level angle, which is important for accurate herbicide spraying. The adjustable wheelbase width allows the robot to accommodate for varying crop planting widths. Although these features enable key behaviors, motions, and applications, they come with extra challenges in control and state estimation. Due to the actions of the rocker and the width changing mechanisms, calculating required wheel torques can no longer assume a fixed width, rectangular base and therefore the algorithms must be more flexible than those of most wheeled mobile robot platforms. Odometry motion models are also complicated by the changing wheel base.
- Sponsor: NSF, USDA/NIFA
- Partner: University of Florida (PI Yiannis Ampatzidis)
- Overall Goal: develop low-cost and multi-crop autonomous vehicles equipped with the precision spray technology, high-level task planning and control system for the autonomous precision sprayers
- CMU Goals:
- Robotic platform capable of autonomous navigation through crop fields
- Build two robots: Jim, Abhi, Rohan
- Develop control methodology for trajectory following: Rohan
- Autonomous navigation: Abhi, Rohan People: Abhi (lead), Jim, Rohan
- Duration: 2021-2024