The selection of exposure time and lens aperture is dependent on lighting and motion blur. Too much exposure or aperture causes burnout and lack of detail in images. Too much motion blurs detail such that images aren’t usable for computer vision operations such as calculating depth models from stereo.
Pixel Value vs. Intensity, Time and Aperture
The numeric value of each pixel in a camera’s image is an integration of the intensity of light that reaches the pixel over the duration that the image is exposed. Intensity is governed somewhat by aperture because less light is admitted through a smaller aperture and more light is admitted through a larger aperture.
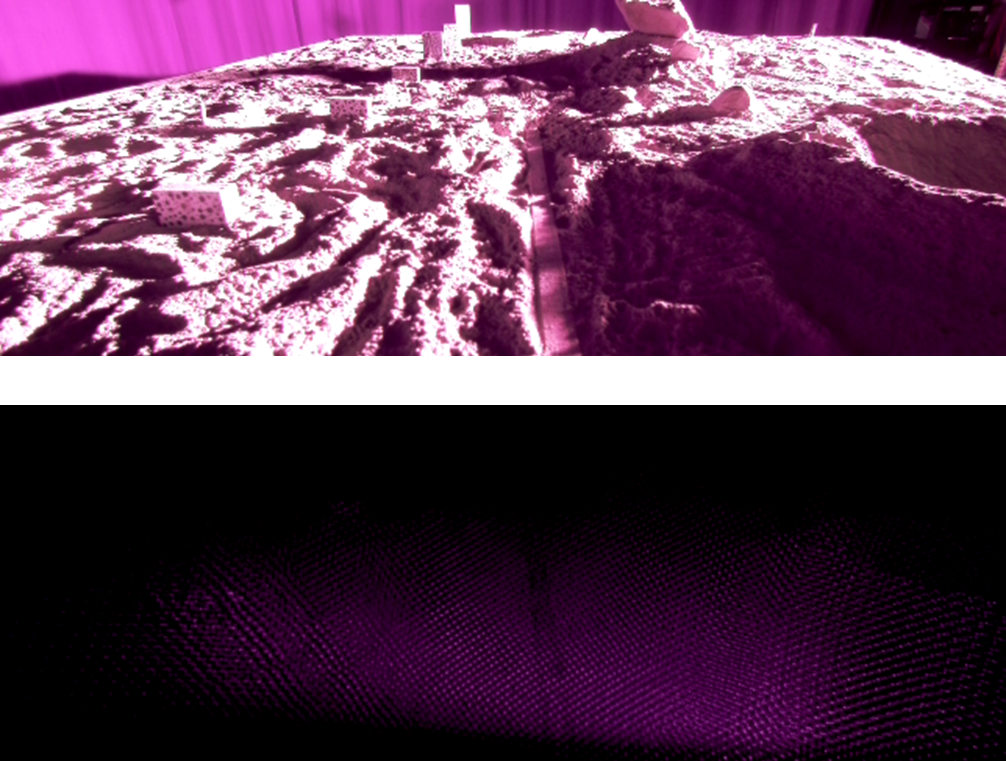
Binary Lighting Intensity on the Moon
Mixed lighting and shadowing on the Moon is nearly binary (top). Dark regions on the Moon are nearly black (bottom). The only faint illumination is lighting by the rover as it takes this image. That lighting is only 1 W/m2, orders of magnitude less than lunar sunpower, hence the image appears almost entirely black to the human eye. The image is nearly black to a camera unless long camera exposure or large aperture is utilized.
Sunlight illuminating the Moon doesn’t pass through an atmosphere, so the Moon’s brights are very bright. Since the light isn’t diffused by an atmosphere, its shadow edges are very sharp and its darks are nearly black. Since illumination is either bright or truly black, terrain lit in a mixed manner is rather binary. This is very different from what we experience on Earth. The Earth’s light passes through its atmosphere which (1) reduces its power from 1350 W/m2 to 1120 W/m2 and (2) diffuses the light so that Earth’s shadows are neither sharp-edged or truly black. Too long of an exposure in sunlit terrain will wash out regions of the image. Too short of an exposure in terrain having only weak rover-provided illumination creates images that are too dark to be interpreted.
Motion Blur
Two images taken at 50 ms exposure. The camera is stationary while taking the left image resulting in a sharp image. The camera is sweeping through a turn while taking the right image. Whereas detail is sharp in the static image, detail is obscured by blurring in the right image. The blurring in the right image would be untenable for rover-relevant vision computations such as stereo.
An autonomous rover’s images must be sharp enough for its perception, visual odometry and stereo to succeed. A camera has to be still enough during exposure to snap sharp enough images. One approach to ensuring slow enough camera motion is to stop to acquire every image. This supports the “step-stop-image-move” driving of early rovers, but doesn’t support MoonRanger’s ambition to stay in continuous motion. The challenge is to capture good-enough images on the fly without stopping after every control cycle to take images. Given that MoonRanger operates in continuous motion, camera exposure time must be sufficiently short to minimize blur.