
Vine Pruning Google Mineral X
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Training of a RL agent for viewpoint optimization and reaching pruning points in dormant vine trees
The work is composed in three parts:
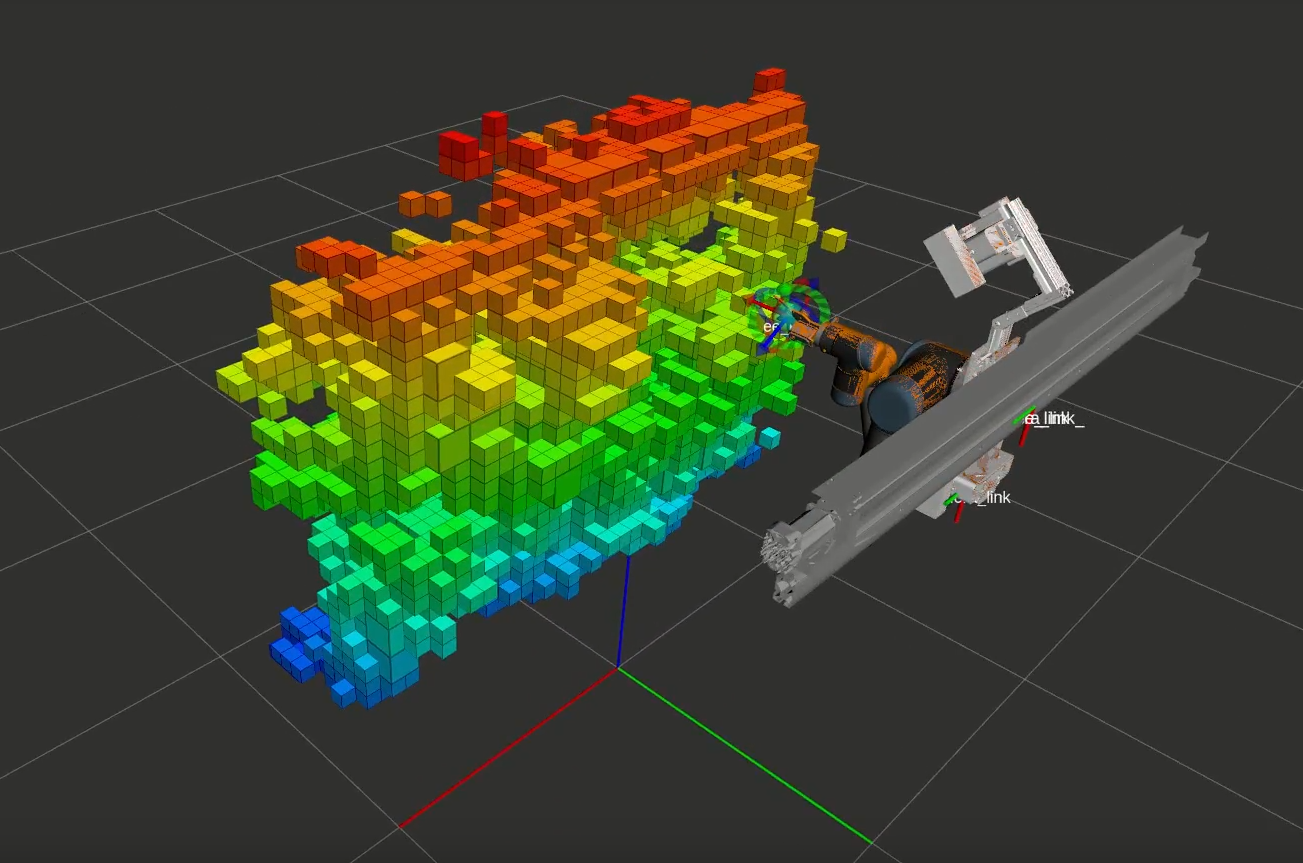
- i) Simulation and modeling of fruit trees: I used a point cloud to create a 3d model of the fruit tree and simulate its dynamics. The tree is described as a series of links and joints using the URDF format.
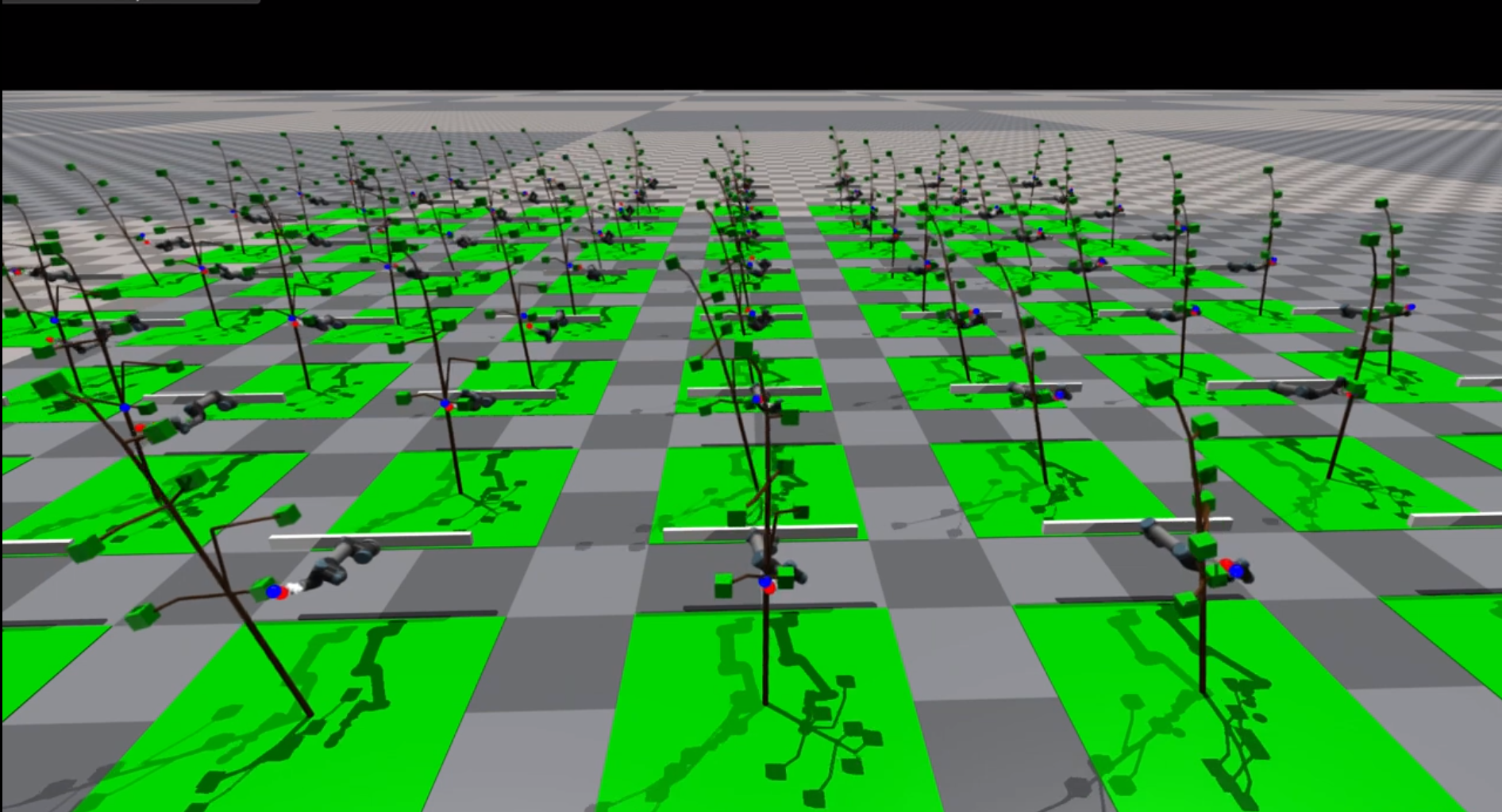
- ii) Reaching pruning points: I used the open implementation of several RL algorithms available in Stable Baselines 3to train 7 DOF robot (ur5 + linear slider) to reach pruning points in vines with simple structures. The algorithm we used is PPO, which performed similarly to the classical approach (RRT planner in Moveit). The experimental tests were performed in simulation and the real robot. An ICRA paper was published as a consequence.
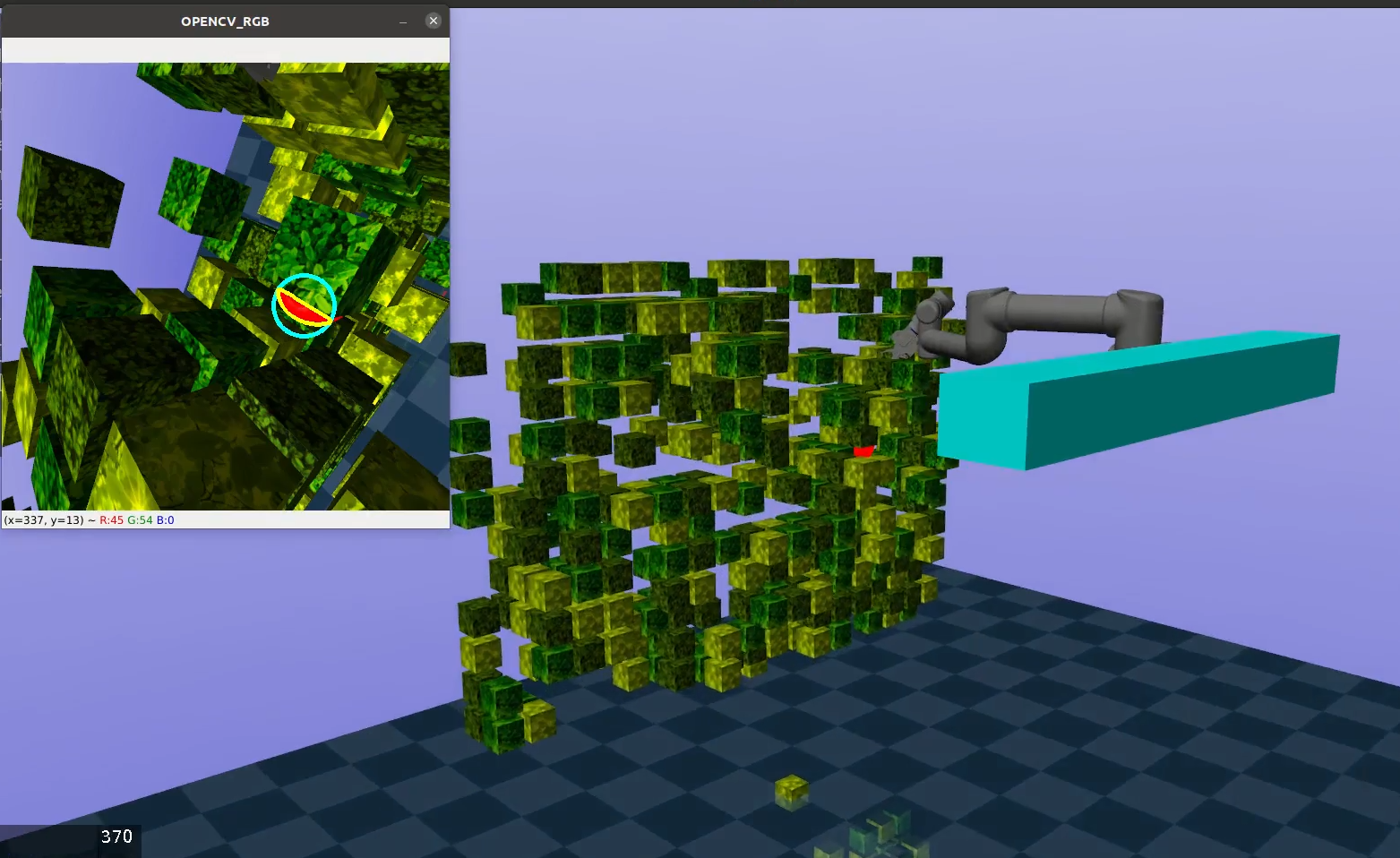
iii) Viewpoint optimization: I studied several methods of inverse reinforcement learning (IRL) using the implementations provided in the imitation repo. After several months of testing different algorithms, no one showed great success and we finally used PPO This alternative provided better results, especially when using the learned policy only for fixing the camera. The initial approach was done by a classical method
Status:
At the date (Sept 2022 ) the project is in a 3rd phase, where we are looking forward to evaluate the fixation policy in the real robot.
The work is planned to continue by using a learning approach to start manipulating the canopy, pushing away branches that can make very difficult to reach the objective point. This is a collaboration with David Held’s group.
Sponsors/Partners: