
Home » SafeForest
SAFEForest Portugal
Developing an advanced robotic system for the prevention of wildland and wildland-urban interface (WWUI) fires.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Unmanned Aerial Vehicle Mapping with Semantic and Traversability Metrics for Forest Fire Mitigation
Project Overview
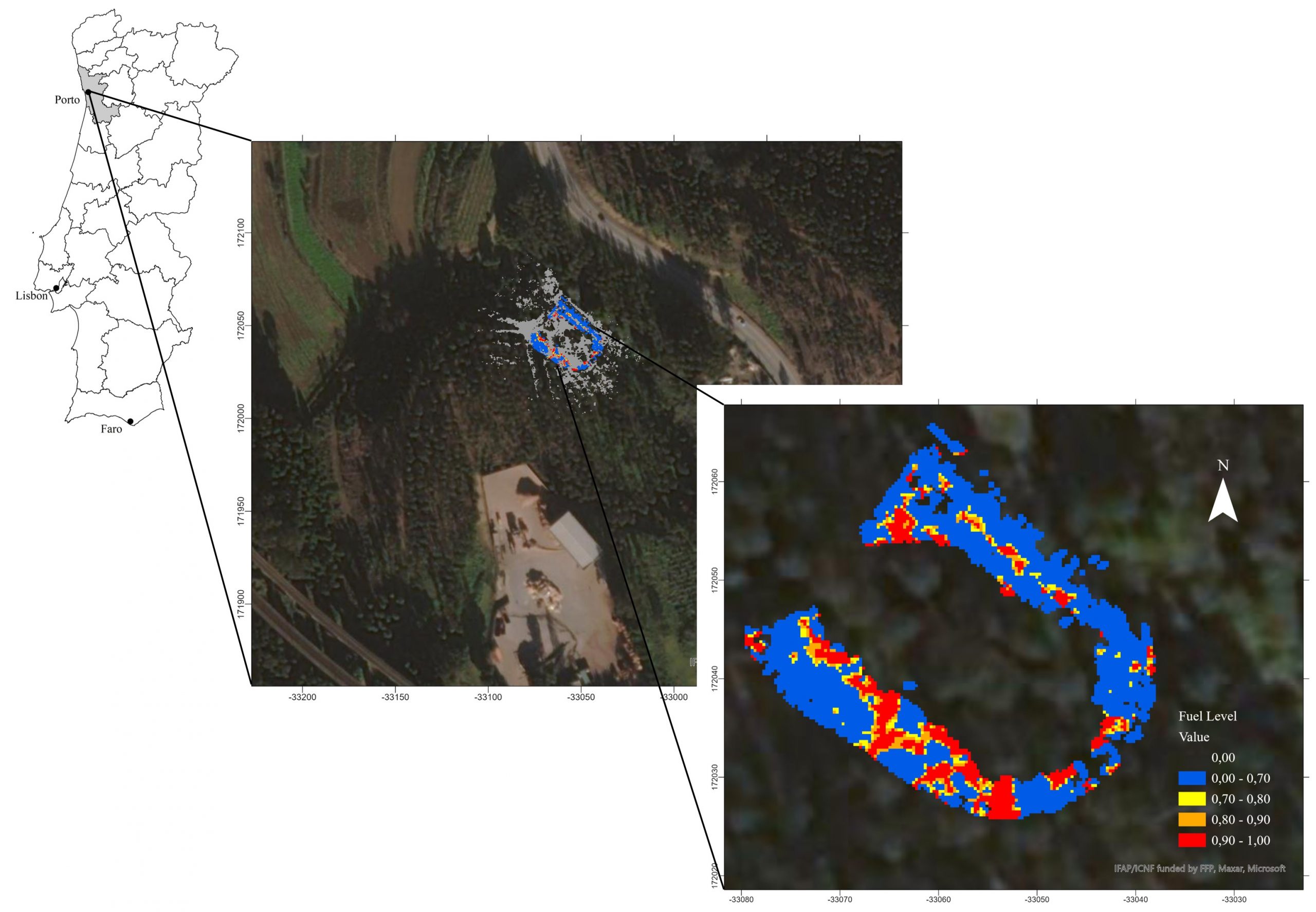
We aim to address the prevalent issue of forest fire through mitigation. Since one of the forest fires can be field by dried, flammable vegetation in the forest, we propose using an unmanned aerial vehicle (UAV) to generate a mapping of the forest, and an unmanned ground vehicle (UGV) to use the information from the mapping to clear the forest of flammable vegetation. We have a SLAM and semantic mapping system that is uses data collected from a UAV with a payload system containing LiDAR, visual and inertial modalities to produce a mapping of the forest with information which tells: 1) what is flammable tin the forest; 2) what areas are traversable for a ground vehicle.
Research Effort
We are working on developing the Simultaneous Localization and Mapping (SLAM) pipeline that interfaces with the Semantic Segmentation pipeline for use in the Safe Forest Project. SLAM is used to derive the odometry of the unmanned aerial vehicle as it flies under and over the canopy. This odometry information is used to register multiple sensor modalities and generate a mapping of the environment which contains labels of flammable material and non-flammable material in the forest. The mapping of the environment along with traversability information will ultimately be relayed over to an unmanned ground vehicle which will be used to clear the forest of flammable material.
Summary of Specific Work
The current SLAM pipeline used in this project contains a visual, inertial, LiDAR and GPS.
Status of Work
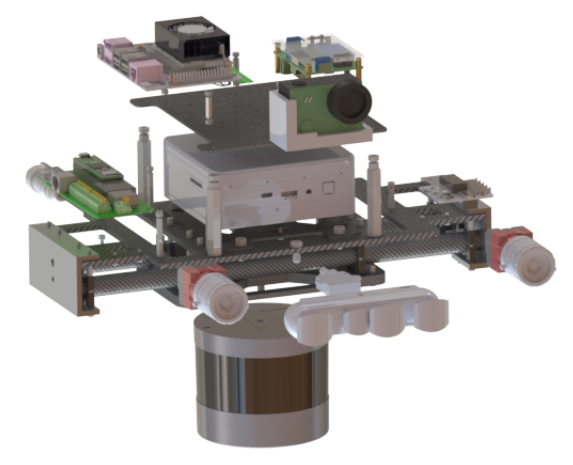
Currently, we have constructed a payload (2022 payload), which contains two stereo cameras, two onboard computers (Jetson Xavier NX Development Kit and Intel NUC), a multispectral camera (mapir survey3), IMU (vectornav VN-200), and a LiDAR (Velodyne Ultra Puck).
Sponsor/Partners
We are working closely with our sponsors and collaborators in Portugal, namely Ingeniarius Ltd and University of Coimbra. We are currently in the process of working out an SBIR with two smaller start-up businesses.