Harveri: A Small (Semi-)Autonomous Precision Tree Harvester ![]()
![]()
Authors: Edo Jelavic, Tun Kapgen, Simon Kerscher, Dominic Jud, Marco Hutter
Abstract:
This article presents the development of a small harvester (Harveri) targeted for thinning operations and energy tree harvesting. We are interested in two possible use cases: teleoperation by a human and fully autonomous operation. We introduce Harveri itself, together with the hardware modifications made to facilitate the automation of the machine. Furthermore, we describe the sensors used and the rationale behind each sensor choice and physical placement on the machine. The article also discusses computation units used to achieve the teleoperation and autonomy task and connectivity to the machine. Most of the autonomy features are ported from our previous work on HEAP, and in this article, we describe the modifications necessary for Harveri. We present the current automation progress and give directions for future work.

UAV Mapping with Semantic and Traversability Metrics for Forest Fire Mitigation ![]()
![]()
Authors: David Jacob Russell, Tito Arevelo, Chinmay Garg, Winnie Kuang, Francisco Yandun, David Wettergreen, George Kantor
Abstract:
The negative impacts of forest fires are dramatically increasing, which is driven by the effects of climate change and other factors. Robotics systems are one method to improve the feasibility of prevention and mitigation efforts. In this work we propose a unmanned aerial vehicle (UAV) that can map a region, for example so an unmanned ground vehicle (UGV) can autonomously clear fuel to prevent the spread of fire. We developed a multi-sensor payload consisting of cameras, LiDAR, and GPS with onboard processing. We also implement a SLAM system to understand the 3D structure of the environment, a semantics system to identify fuel and other features in the environment, and a traversablilty system which predicts which region a UGV can navigate. This approach provides a 3D map of the environment and georegistered maps describing the locations of fuel and traversable regions. We validate our system with preliminary field trials and show that this is a promising approach.

Empowering Field Workers: A Cognitive Architecture for Human-Robot Collaboration ![]()
![]()
Authors: Beril Yalçinkaya, Micael Santos Couceiro, Salviano Pinto Soares, Antonio Valente
Abstract:
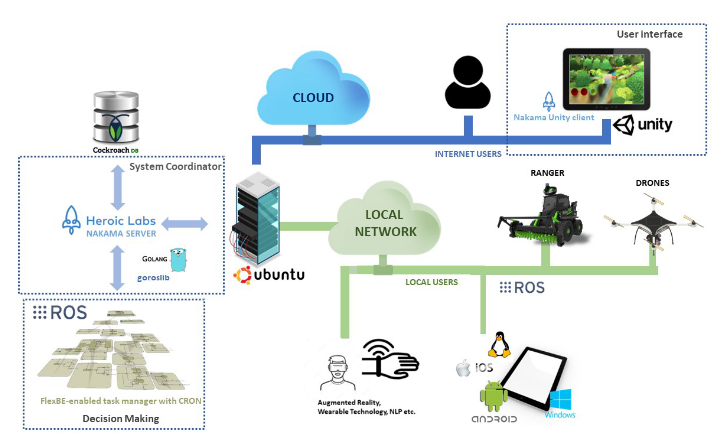
Field robots are adaptable and sensitive to dynamic, unstructured and, therefore, challenging environments, such as in agriculture, forestry and construction. These robots perform demanding tasks that require too much time, labour and, most of the time, that are even hazardous for humans. Although humans still outperform robots in these domains with the ability to have critical thinking, strategy, empathy and physical skills, there is plenty of room for humans to outperform themselves by collaborating with robots. This position paper aims to explore the concept of human-robot collaboration in field robotics, wherein human operators take advantage of a multi-robot system for physically unendurable tasks, and robots benefit from the shared control and assessment of humans in dynamic and unknown environments. This paper presents an earlier stage of development towards this ambitious goal by proposing a conceptual architecture for human-robot collaboration in challenging applications and its envisaged future direction.
Procedural Generation of Synthetic Forest Environments to Train Machine Learning Algorithms ![]()
![]()
Authors: Rui Nunes, João Filipe Ferreira, Paulo Peixoto
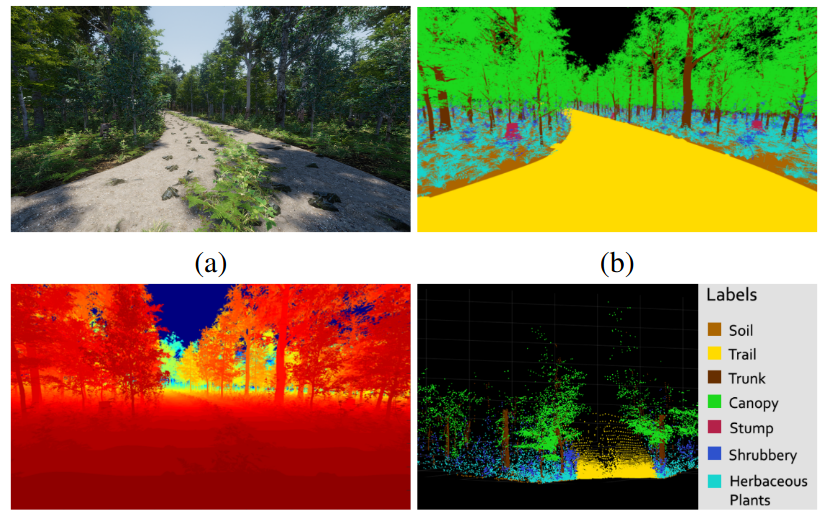
Abstract:
The demand for the development of forestry robotics has been increasing. As with most robotics applications, Machine Learning is the engine driving innovation in this field. However, Machine Learning development for robotic perception tasks is highly dependent on the availability of annotated datasets. Contrasting with urban environments, public datasets for forest applications are rare, hard to collect and currently not enough to train models capable of operating autonomously. This paper proposes a solution to mitigate the data shortage problem: a system that uses procedural generation to create virtual forests and collects synthetic data from these environments using virtual sensors. More specifically, the system generates RGB images and point clouds with pixel-wise and point-wise annotations, respectively, as well as depth maps, substantially reducing the time and effort invested in dataset construction. The system proved capable of generating 1000 frames with all the above-mentioned data types in 3 hours of autonomous operation. The generated data is ready to be used in Machine Learning model training. Finally, qualitative preliminary results obtained by a semantic segmentation model trained on the generated dataset, which has been made publicly available in a community-wide repository, are presented.
Training Deep Learning Algorithms on Synthetic Forest Images for Tree Detection ![]()
![]()
Authors: Vincent Grondin, François Pomerleau, Philippe Giguère
Abstract:
Vision-based segmentation in forested environments is a key functionality for autonomous forestry operations such as tree felling and forwarding. Deep learning algorithms demonstrate promising results to perform visual tasks such as object detection. However, the supervised learning process of these algorithms requires annotations from a large diversity of images. In this work, we propose to use simulated forest environments to automatically generate 43k realistic synthetic images with pixel-level annotations, and use it to train deep learning algorithms for tree detection. This allows us to address the following questions: i) what kind of performance should we expect from deep learning in harsh synthetic forest environments, ii) which annotations are the most important for training, and iii) what modality should be used between RGB and depth. We also report the promising transfer learning capability of features learned on our synthetic dataset by directly predicting bounding box, segmentation masks and keypoints on real images.

Model Pruning in Depth Completion CNNs for Forestry Robotics with Simulated Annealing ![]()
![]()
Authors: M Eduarda Andrada, João Filipe Ferreira, George Kantor, David Portugal, Carlos Henggeler Antunes
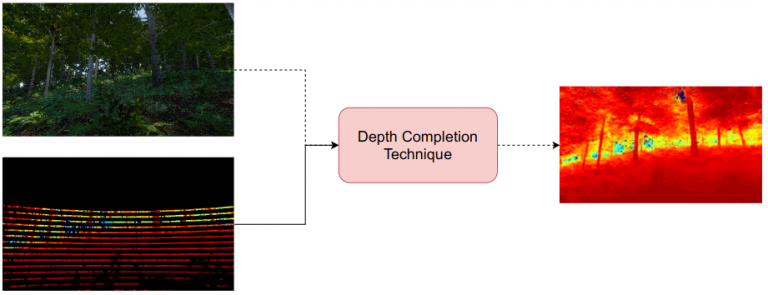
Abstract:
In this article, we present an analysis of model compression in depth completion neural networks for forestry robotics, considering the increasing demands of real time autonomous solutions. Specifically, we implement a single state simulated annealing meta-heuristic for model pruning in the ENet and MSG-CHN neural networks for depth completion. We run experiments in three different datasets and analyze how different levels of pruning affect the accuracy and speed of the models. Experimental tests show that increasing sparsity has different effects depending on the neural network and dataset. ENet has neglectable difference in accuracy and it would greatly benefit from lowering the amount of FLOPs, while MSG-CHN displays an inconsistent behavior depending on the dataset. This suggests that while both models benefit from model compression techniques, the optimal sparsity level depends on environment, dataset and neural network.
Morning Session ![]() Afternoon Session
Afternoon Session ![]()
Tailoring 3D Mapping Frameworks for Field Robotics ![]()
Authors: Frascisco C. Ferreira, Martí Zaera, Panagiotis T. Karfakis, Micael Santos Couceiro
Abstract:
Mapping is an essential part for the adoption of robots in agricultural and forestry environments. Providing the robot with the ability to map its surroundings, facilitates its navigation and is necessary for implementing obstacle avoidance, without human interference. Herein we present the challenges of outdoor environments, present an overview of existing mapping frameworks and then evaluate their suitability for field applications. Two widely used mapping frameworks, OctoMap and RTAB-Map are analyzed within the Robot Operating System (ROS) ecosystem and a parametric study is carried out in order to assess their performance, under both simulated and real-world constraints. Finally this work aims to be utilized as a deployment reference guide for mobile robotic applications in outdoor environments.

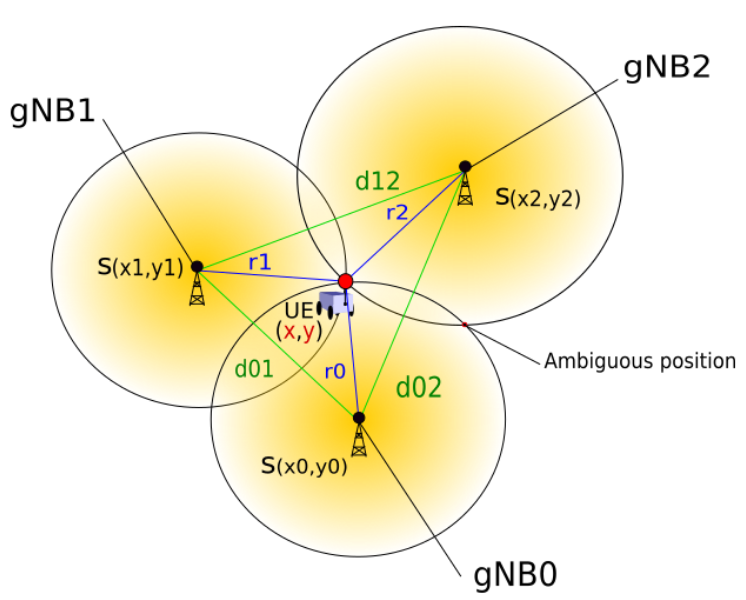
A Comparative Study of Mobile Robot Positioning Using 5G NR ![]()
Authors: Panagiotis T. Karfakis, Micael Santos Couceiro, David Portugal, Carlos Henggeler Antunes
Abstract:
In this work we study the use of the 5G New Radio (NR) communication model for position tracking of a mobile robotic system. We have deployed the 5G NR in three different configurations in a simulated agricultural environment. We evaluate the impact of using different number of gNodeB (gNB) base stations and the increased topological complexity on the position estimation, using three different heuristic approaches. The setups consist of 5, 10 and 15 gNBs that communicate with the user equipment (UE) carried by the robot. The ground truth trajectory of the system is recorded and estimated by three meta-heuristics, namely Hyperbola Crossing points (HCP), Particle Swarm Optimisation (PSO) and Genetic Algorithm (GA). We measure the performance according to statistical metrics such as the average prediction time, the average Euclidean Distance (ED) and their standard deviations. We provide and discuss the qualitative results derived experimentally to assess the positioning capability of 5G NR for a simulated field robotics application.
Comparative evaluation of mobile platforms for non-structured environments and performance requirements identification for forest clearing applications ![]()
Authors: Joao Luis Lourenco, Luis Conde Bento, Anibal T. de Almeida
Abstract:
The effort to automate is present across all industries. It has an economic purpose but an effect that goes far beyond economics. Research was carried out and a lot of investment was made in the automation of processes in industries such as agriculture and forestry, which resulted in incredible advances and the emergence of very interesting solutions for the most diverse applications. In fact, more solutions have emerged in the field of agriculture than in any other, what can be explained economically but also because of technical difficulties such as the navigation in special unstructured environments like forests. This paper, carries out a comprehensive review of existing platforms and presents a comparative study for an application in forest clearing. This evaluation is made in terms of its size, automation levels, traction energy source, locomotion systems, sensors/actuators availability and tools, resulting in an assessment of what characteristics it must have to succeed in its function. Hence, it will be possible to evaluate whether or not it is reasonable to perform refitting of an existing platform into an electric Unmanned Ground Vehicle for Forest Clearing or is more adequate to start from scratch its development. The evaluation results revealed that an electric Unmanned Ground Vehicle for Forest Clearing is currently unavailable in the market and that a new platform project development is needed. The performance requirements for such a platform are identified and proposed in the paper.

Online Forest Mapping and Inventory Generation using Handheld LiDAR ![]()
Authors: Alexander Proudman Milad Ramezani Sundara Tejaswi Digumarti Nived Chebrolu Maurice Fallon
Abstract:
Mobile LiDAR sensors are increasingly being used to scan environments in ecology and forestry applications. However reconstruction and characterization are typically performed offline. Motivated by this, we present a LiDAR based framework, running on a handheld device, that is capable of creating 3D point cloud reconstructions of large forest areas, segmenting and tracking individual trees and creating an inventory in an online manner. Segments of a tree from multiple views accumulated over time are combined and the corresponding tree models are also updated. Providing immediate feedback to the operator via a screen on the device is a key feature of this work as it enables satisfactory coverage of the area being mapped without gaps and missing sections. We employ a pose-graph based SLAM system with loop closure detection to correct for drift errors allowing us map large areas accurately. Multi-session mapping capability is also supported with the ability to automatically merge data captured during different runs in a post-processing step. As an example parameter for the forest inventory, we estimate the Diameter at Breast Height (DBH) of individual trees, in an online manner, by fitting cylinders to detected tree trunks through a least-squares optimization within a RANSAC loop. We demonstrate our mapping approach operating online in two different forests (both ecological and commercial) with a total travel distance spanning several kilometres. Further, our DBH estimates are within ∼7 cm accuracy for 90% of the detected trees in the ecological forest.

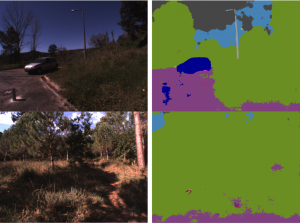
Vegetation classification using DeepLabv3+ and YOLOv5 ![]()
Authors: Paulo Armando da Silva Mendes, Antonio Paulo Coimbra, Anibal T. de Almeida
Abstract:
Semantic segmentation and object detection are challenging tasks in computer vision. In recent years the performance of semantic segmentation and object detection has been greatly improved by using deep learning techniques. A large number of novel methods have been proposed to achieve the best results ranging from autonomous vehicles, humancomputer interaction, robotics, medical research, agriculture and virtual and augmented reality systems. In this work it is presented two methodologies to classify vegetation in complex environments, namely forests, using Deep Learning techniques. Deep Learning methods were used to classify vegetation for forest fires fuel/dry vegetation cleansing and also autonomous navigation. A key challenge for autonomous navigation in cluttered outdoor environments is the reliable discrimination between obstacles that must be avoided at all costs, and obstacles/objects that need to be identified to pursue the intended action of the robot. In this paper it is presented a brief study of the state of the art in object detection and also semantic segmentation. Also it is presented results of DeepLabv3+ semantic segmentation and YOLOv5 object detection of vegetation for an Unmanned Ground Vehicle (UGV) to clean forest fires fuel in forest complex environments.
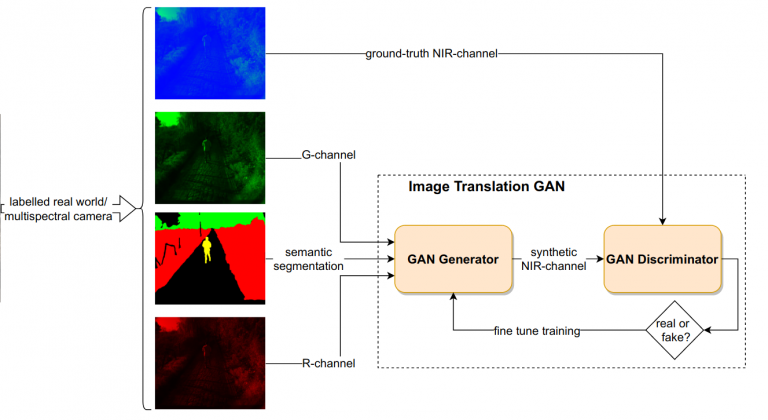
Generating Synthetic Multispectral Images for Semantic Segmentation in Forestry Applications ![]()
Authors: Dominik Bittner, João Filipe Ferreira, M Eduarda Andrada, Jordan J. Bird, David Portugal
Abstract:
In this paper, we introduce a GAN-based solution for generating synthetic multispectral images from fully-annotated RGB images for data augmentation purposes in forestry robotics applications at ground-level. Fully-annotated multispectral datasets are difficult to obtain with sufficient training samples when compared to RGB-based datasets, since annotation in this case is often very time-consuming and expensive due to the need for expert knowledge. In this text, a study comparing different GAN-based image translation models designed for data augmentation is presented. Synthetic images generated by the proposed solution are shown to be realistic enough to yield performance ratings comparable to what is obtained using real images.