
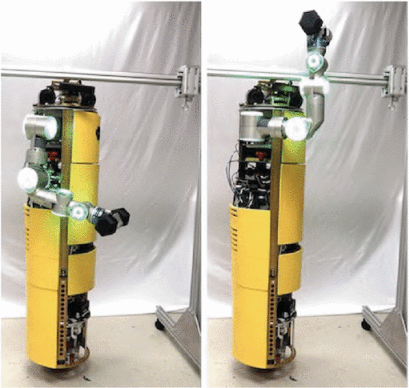
Agile and Dynamic Interactions for Mobile Manipulation
This project is focused on the development of robots that can safely and efficiently work alongside people in crowded spaces using the Ballbot Platform. This project is a collaboration with Professors Ralph Hollis and Nancy Pollard.

Agriculture Interaction
The agriculture interaction project is focused on picking specialty crops such as apples in unconstrained and heavily occluded environments by modeling and manipulating flexible objects such as branches. This project is a collaboration with George Kantor.
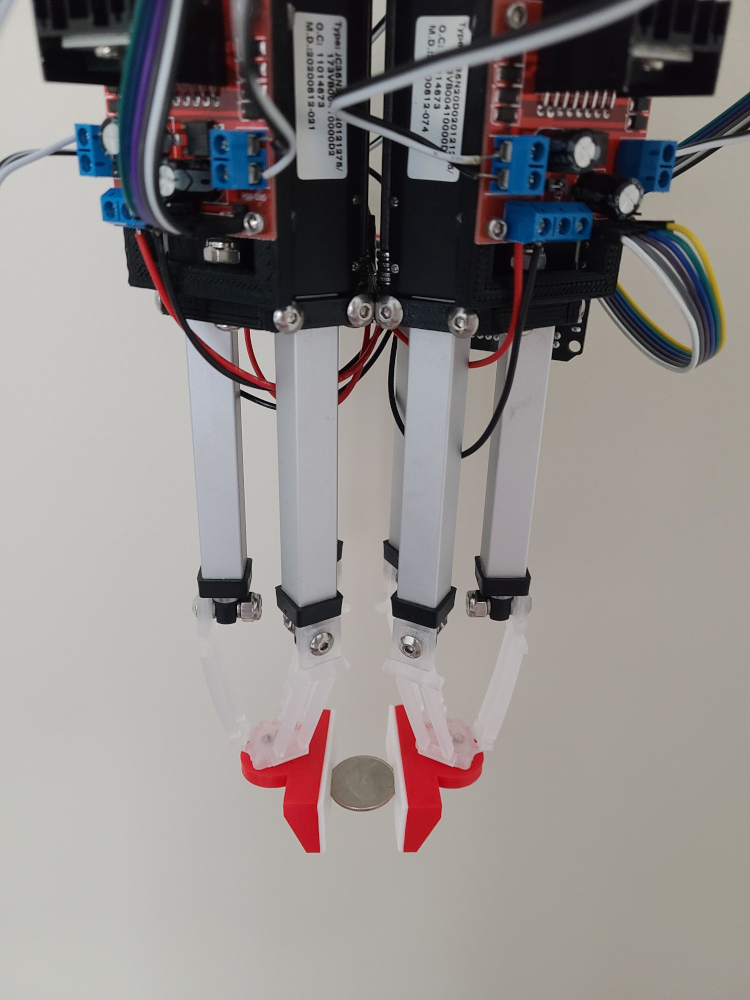
Delta Arrays
The delta array project is focused on using arrays of miniature delta bots on a robot's end-effector in order to achieve greater dexterity and granularity in manipulation tasks. This project is a collaboration with Professor Zeynep Temel.
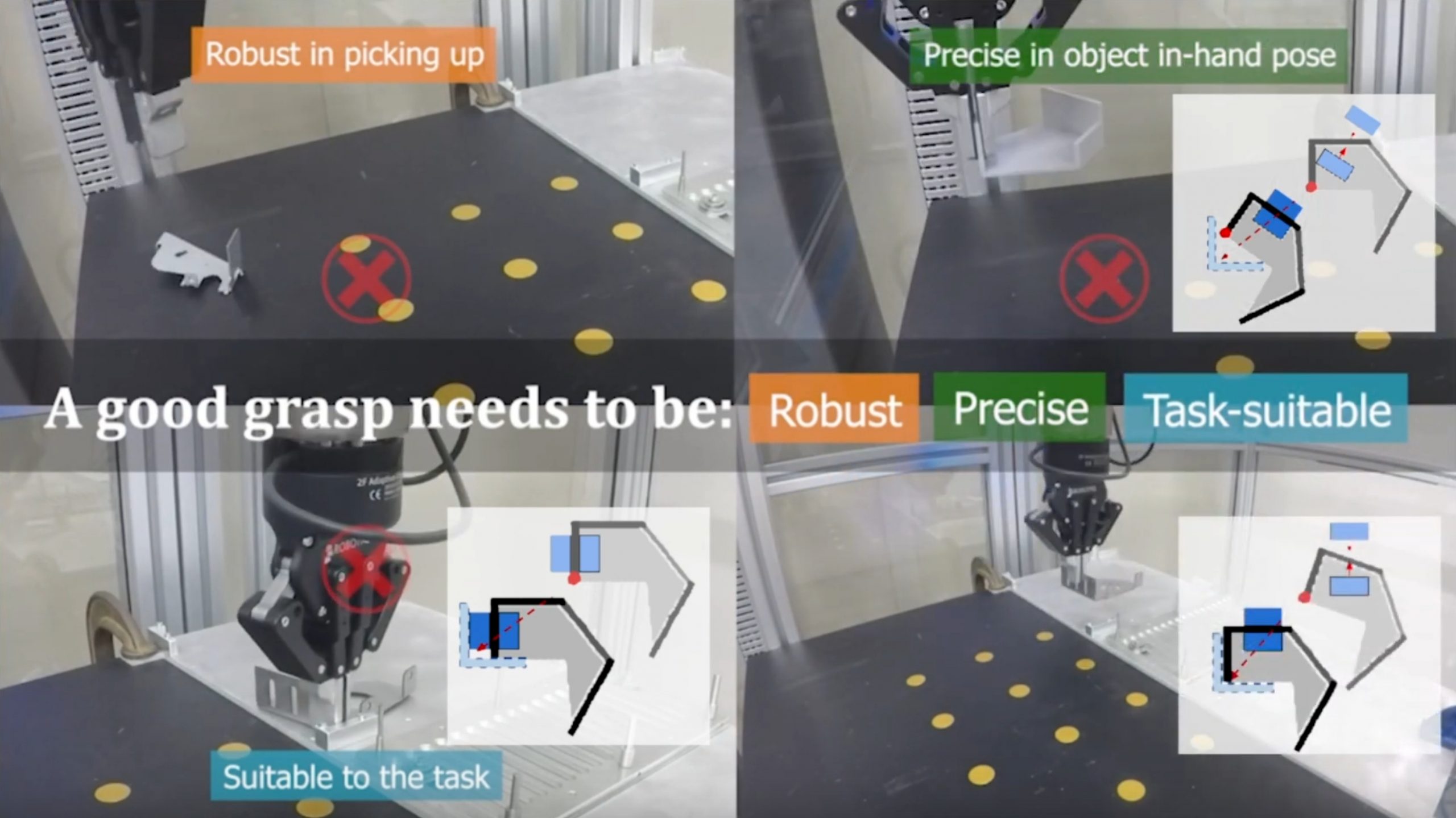
Epson Manufacturing
The goal of the Epson project is to use simulators to inform the real robot of better task-oriented grasping locations to reduce uncertainty of the in-hand object pose for accurate placement and insertion in manufacturing environments.
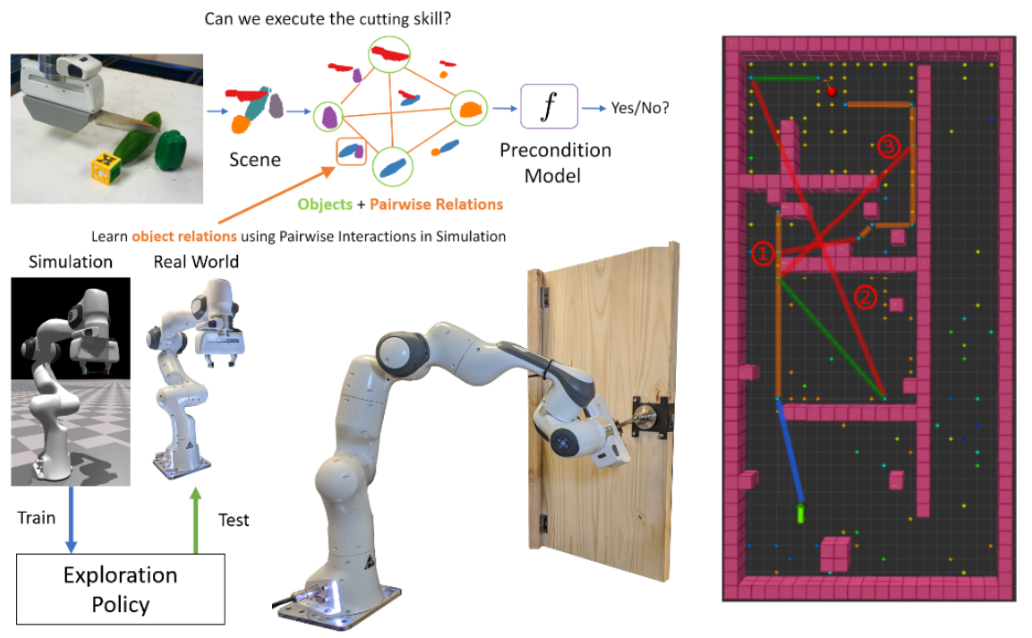
Planning Integrated with Lifelong Learning for Advanced Robotics
PILLAR is a robotics research project that aims to integrate model-based planning methods with experience-based learning methods into one general, robust, and adaptive framework with sound theoretical guarantees. This project is a collaboration with Professors Maxim Likhachev and Dieter Fox.

Sony Gastronomy
The Sony gastronomy project is developing methods for robots to model and learn manipulation skills for preparing food, such as salads. This project is a collaboration with Professors Henny Admoni, Katerina Fragkiadaki, and Manuela Veloso.
EFORT Visual Servo Grasping
The EFORT project focused on grasping novel objects in cluttered environments using a combination of visual servoing and a grasp quality prediction network that was trained using an automated data collection pipeline.

MBZ International Robotics Challenge 2020
The 2020 MBZ International Robotics Competition consisted of three challenges: a team of UAVs that autonomously popped balloons and captured a ball from an unknown UAV, a team of UAVs and a UGV that autonomously picked up and placed blocks, and a team of UAVs and a UGV that autonomously extinguished a series of fires in an urban setting.