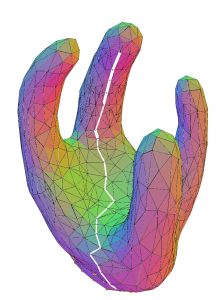
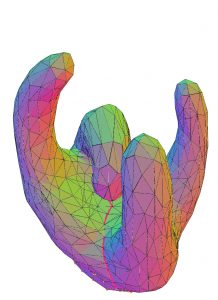
Due to their continuously deformable nature soft robots are notoriously difficult to design and control. The polyurethane foam we use for our foam hands can undergo large reversible deformations. In order to model the deformation of foam resulting from the contraction of tendons we have developed a custom finite-element simulation framework. This framework provides users with an interactive and intuitive simulation tool to make informed design choices in simulation prior to manufacturing the physical robot. It can furthermore predict deformations with respect to tendon actuation which can be used to create control models. The video below shows how easy it is to place tendons and investigate the effects of tendon placement on the robots capabilities.
Have a look at our publications to learn more about our simulation framework and how we have been using it to model soft hands.
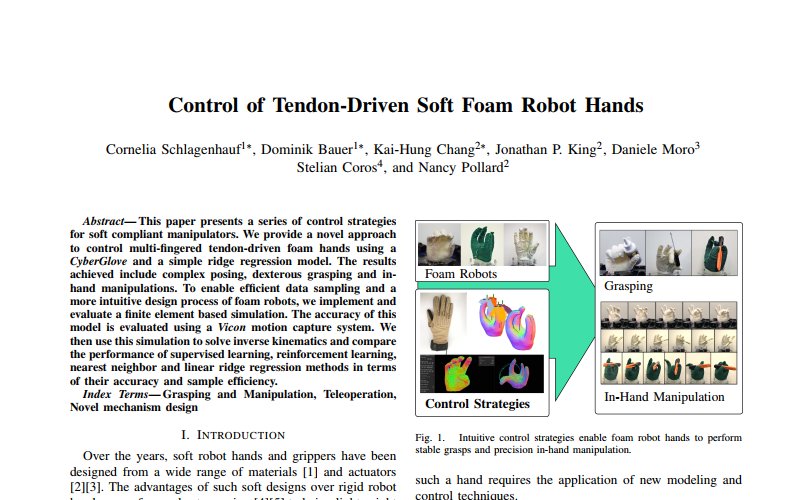
C. Schlagenhauf, D. Bauer, K-H Chang, J. P. King, D. Moro, S. Coros, and N. S. Pollard, 2018. Control of Tendon-Driven Soft Foam Robot Hands, IEEE-RAS International Conference on Humanoid Robotics (Humanoids), Beijing, China, November 2018.