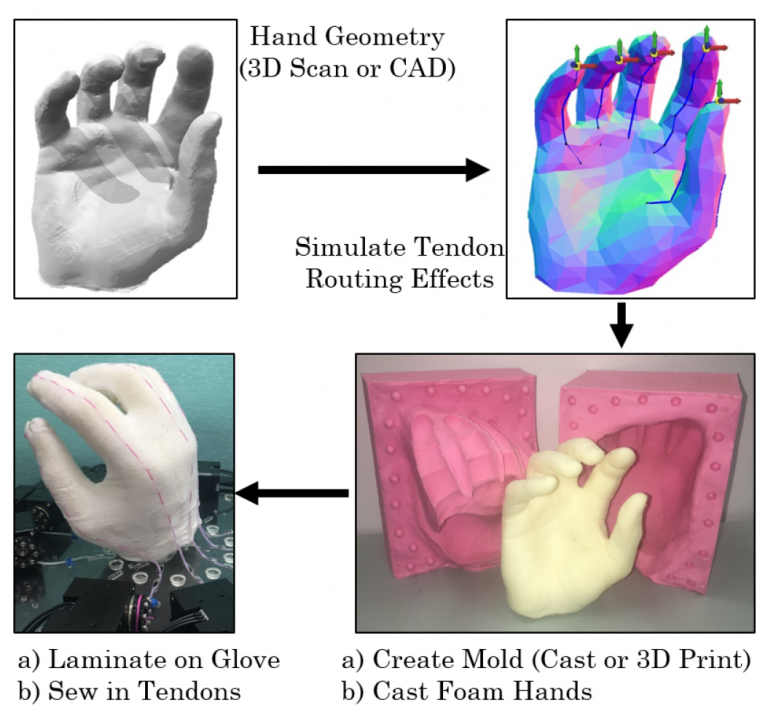
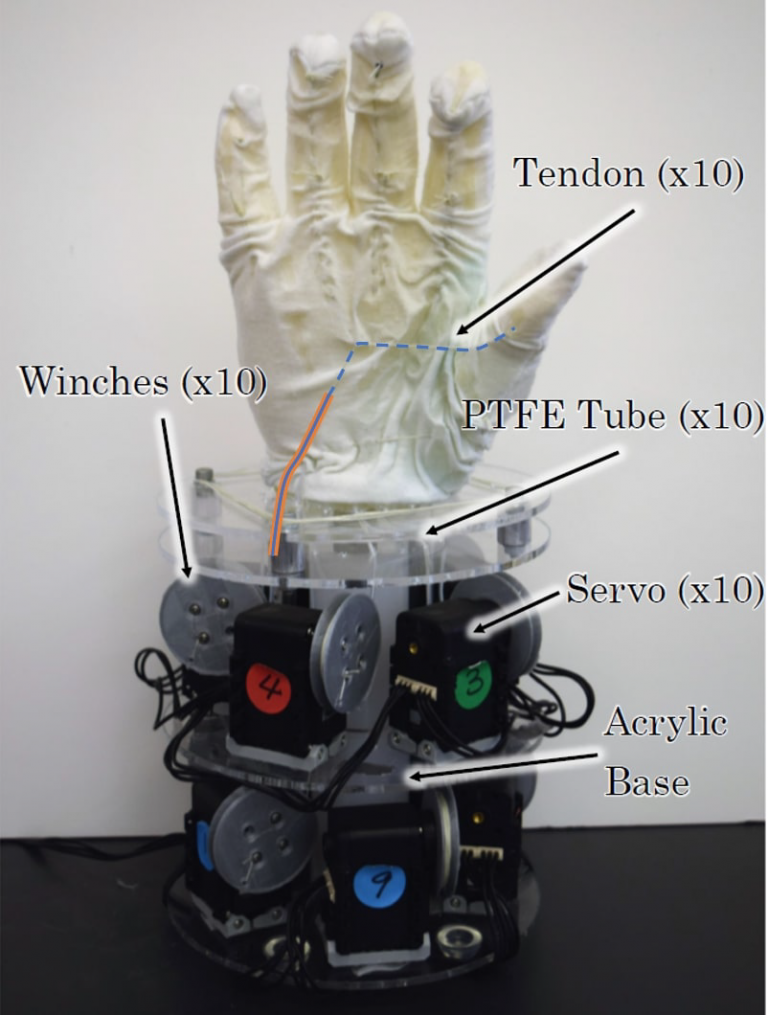
We present a novel class of tendon-actuated soft robots, which promise to be low-cost and accessible to nonexperts. The primary structure of the robot consists of flexible foam, and so we term the robots created using our approach “foam robots.” A foam robot moves by driving servo mounted winches that contract (or slacken) tendons routed through the robots textile skin. We provide a methodology for fabricating these types of robots and go on to fabricate several ‘foam robots’ in the form of multi-fingered hands and perform various experiments and demonstrations to illustrate the robust applications of these robots to tasks such as dexterous manipulation.
See the associated paper! (Best Interactive Paper – Finalist, IEEE Humanoids 2018)